<追記:2015.09.14>実験したブレッドボード図を追加しました。</>
発注しておいたICが届いたので実験してみた。
何をしているかというと、「
矩形波だけのファンクションジェネレーター」を作ってみたもののAVRのPWMで矩形波を出力しているが、AVRのクロック由来と思われる30MHz付近のノイズが乗ってしまうのでこれを除去したい。
が、アナログ・フィルターやOPAMPを使ってノイズを除去しようと思うと矩形波の直角な感じがなまってしまってなかなか使いづらい。
思い付きで3-State Bufferの74HC125を通してみたら、クロックノイズは低減されて矩形波の直角な感じも維持もしくは好ましい感じに整形されるみたいなので他のロジックICでもやってみることにした。
使ったICは
74HC125 3-State Buffer
74HC04 Inverter
74HCU04 Inverter(Bufferなし)
74HC4050 Buffer
74HC04と74HCU04の違いはバッファードとアンバッファードとあるが、アンバッファードの方はCMOSのInverter回路1発で反転、バッファードの方は反転回路を3個重ねて最後に反転出力にしているみたいだ。
74HC4050は単なるバッファで中の回路は反転回路2段重ねみたいだ。
実験回路
AVRのPWM出力をロジックICに入力し、ロジックICの出力を1kΩのRで受けて波形を見ることにした(ブレッドボード図では負荷抵抗が10kΩになってますが1kΩで測定)
GNDに入っているインダクタはGNDに乗っているクロックノイズを除去するための気休め。
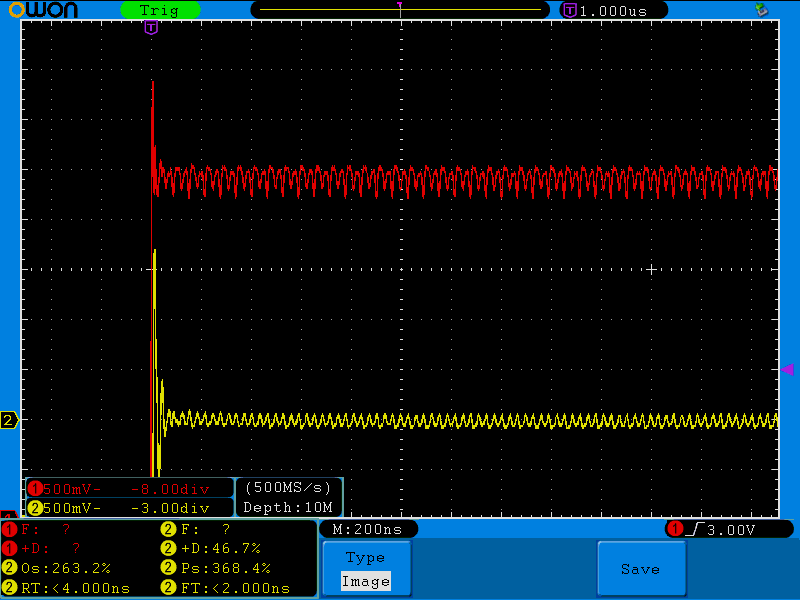
74HC125(3-State Buffer)
赤色が「矩形波だけのファンクションジェネレーター」の出力、黄色がロジックICを通した出力
74HC125(3-State Buffer)x2
3-State Bufferを2回通してみた
74HC04(Inveter)
反転素子なので位相も反転しています。
74HCU04(Inverter Unbuffered)
インバーターのバッファがないタイプ。
このICをアンプとして使っている作例も結構あります。(
秋月のキットとか)
ブレッドボードの配線は74HC04と同じ。
74HC4050(Buffer)
どれもクロックノイズは低減されているし、振動も抑制されている
入力
入力波形が暴れるので、矩形波だけのファンクションジェネレーターの出力をオシロに直結して見てみた
入力波形(赤色の波形)が暴れなくなった(^q^;
ロジックICを通した波形と比べるとクロックノイズは確実に低減されている。
が、ロジックICにつないだ時に入力側に現れる振動の原因は何?と思って0.1uFのコンデンサーと1kΩのRを並列につないでみた
波形の暴れはでてこない。これはわからない(^q^;;;;
CR以外に他の成分も影響してるんだろうか?
ロジックICはあと74VHCというタイプも仕入れていて(高速タイプらしいです)実験したいですが、また今度