STM32CubeIDE: Version 1.5.1
Target board: Nucleo-F446RE
SPI通信の終了時に割り込みを発生させる方法です。
非同期なのでSPI通信中はペリフェラルに仕事を任せてその間MPUは他のことができます。今回は、割り込みでSPI通信を行い、メインループではLチカを行います。
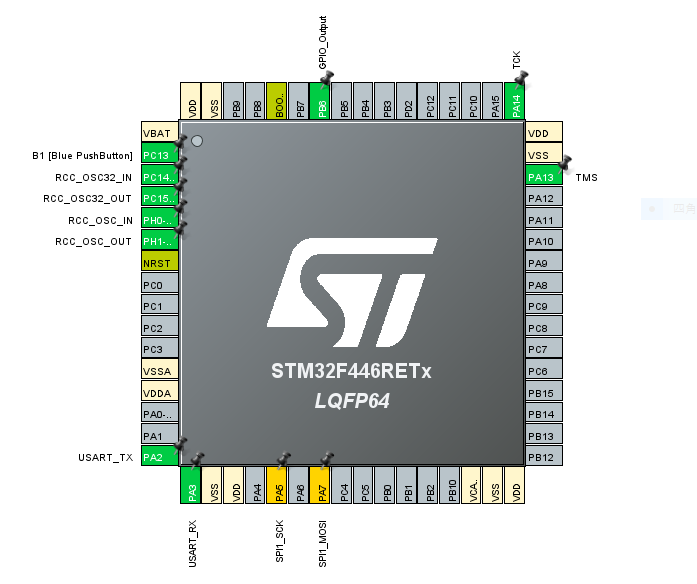
Nucleo-F446REのPin機能の割り当て
MX(Device Configuration Tool)の設定
今回はSPI2を使い、MXのデフォルトのピンアサインにしてみます。Hardware NSSは使っていませんが同じピン割り当てにしました。
Pinout
ピン割り当て
|
ピン名
|
機能
|
|
PB10
|
SPI2_SCK
|
|
PC1
|
SPI2_MOSI
|
|
PB12
|
SPI2_CS (Software)
|
|
PA5
|
LD2(LED)
|
SPIの設定
Prameter Settingsで基本的なパラメータを設定します。
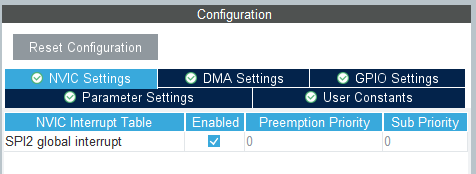
NVIC Settingsで割り込みベクタを設定します。
変更点
Connectivity
SPI2
Parameter Settings
Prescaler (for Bud Rate) 256
NVIC Settings
SPI2 global interrupt Enabled ✓
GPIOの設定
CS(PB12)をSoftware制御するためにGPIOを設定します。
LD2(ボード上のLED)はMXでBoardを指定して初期化すれば、自動的に設定されます。
変更点
System Core
GPIO
PB12
GPIO output level: High // CSはActive Lowのため初期値はHigh
Maximum output speed: Very High
User Label: SPI2_CS
main.cにコードを追加
初期化
/* USER CODE BEGIN PV */
uint8_t data[2] = { 0x55, 0xAA };
/* USER CODE END PV */
送信するデータを定義します。
/* USER CODE BEGIN 2 */
HAL_GPIO_WritePin(SPI2_CS_GPIO_Port, SPI2_CS_Pin, GPIO_PIN_RESET); // CS線をLowに
if (HAL_SPI_Transmit_IT(&hspi2, data, 2) != HAL_OK) {
Error_Handler();
}
// SPI通信が終わっていないのでここではCS線をHighにしない
/* USER CODE END 2 */
割り込みを発生させるにはHAL_SPI_Transmit_IT()を使います。
メインループ
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
// SPI通信と非同期にLチカ
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin);
HAL_Delay(100);
}
/* USER CODE END 3 */
メインループ内ではGPIOを100msごとにH/Lさせます。これによってSPI通信が非同期に行われていることが確認できます。
割り込み処理ルーチン
/* USER CODE BEGIN 4 */
void HAL_SPI_TxCpltCallback(SPI_HandleTypeDef *hspi)
{
HAL_GPIO_WritePin(SPI2_CS_GPIO_Port, SPI2_CS_Pin, GPIO_PIN_SET); // SPI通信が完了したのでCS線をHighに
HAL_GPIO_WritePin(SPI2_CS_GPIO_Port, SPI2_CS_Pin, GPIO_PIN_RESET); // 次のSPI通信のためにCS線をLowに
if (HAL_SPI_Transmit_IT(&hspi2, (uint8_t*)data, 2) != HAL_OK) {
Error_Handler();
}
// SPI通信が終わっていのでここではCS線をHighにしない
}
/* USER CODE END 4 */
割り込み処理ルーチン内で再度SPI通信を開始します。繰り返しSPI通信が行われることになります。
出力信号の観測
Analog Discovery 2のScope機能でLチカの波形、Logic機能でSPI信号とLチカの様子を見ています。
メモ:
STM32CubeIDEのTextEditorではコメントの日本語が文字化けするようです。日本語は使わないほうが無難だと思います。